N
Nolandu45340
Compagnon
Bonjour tout le monde,
Je ne suis pas sûre d'être au bon endroit pour poster mais je tente
N'ayant aucune connaissance dans le domaine je voudrais bien connaître votre avis sur ce type de montage pour la motorisation d'un axe Z ou Y sur nos petites fraiseuses chinoises.
Je mets le lien que j'ai trouvé qui en théorie ça semble bien.
 robdomo.com
robdomo.com
Jean-Marc
Je ne suis pas sûre d'être au bon endroit pour poster mais je tente
N'ayant aucune connaissance dans le domaine je voudrais bien connaître votre avis sur ce type de montage pour la motorisation d'un axe Z ou Y sur nos petites fraiseuses chinoises.
Je mets le lien que j'ai trouvé qui en théorie ça semble bien.
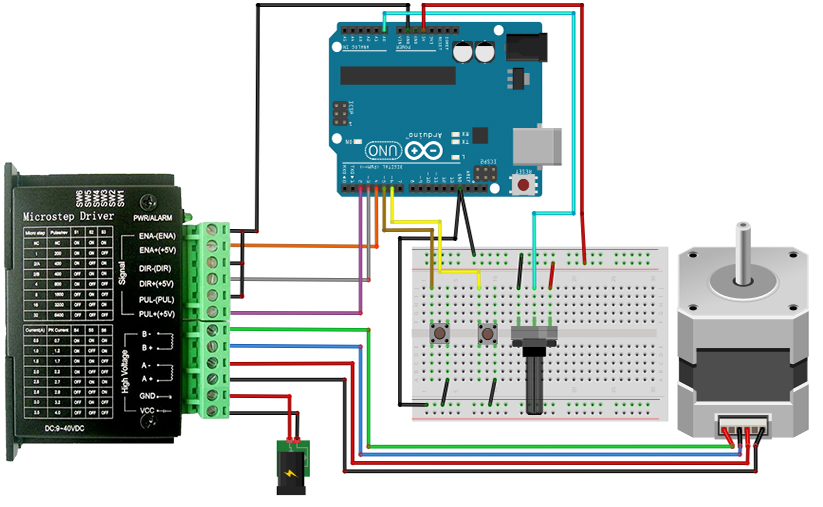
Moteur PAP + Driver TB6600 commandé par 2 boutons + variation de vitesse avec un Arduino * - RobDomo
Prérequis : Matériel : 1 x Carte Arduino Uno 1 x Driver TB6600 2 x Boutons 1 x Potentiomètres 10 KΩ 1 x Alimentation 12v 1 x Moteur PAP bipolaire Fils de connexion 1 x Breadboard Version IDE : Arduino IDE 1.8.19 Vidéo de démonstration : https://youtu.be/eRc7C3o0dhk Schéma de
robdomo.com
Jean-Marc




